Jupiter/TU30で試すGPS 10KHzロック10MHzOCXO(Oct 20~. 2010)
凡そ8ヶ月間GPSの
1pps(1Hz)ロック
による10MHzOCXOの高安定化テストを試みてきた。
しかし1秒に1回のサンプリング(位相比較)に限界を感じる結果となった。
そこで10KHz出力のあるGPS受信モジュール
Jupiter/TU30
を購入し、10KHzロックによる10MHzOCXO制御を試みる事にした。
左は
中国のディーラー
から購入した
RockwellのJupiter/TU30
。なおこの2つの通販サイト(ebay・iOffer)の出展者は同一のBob Mokia氏だが、e-mailも含め大変好意的に対応して頂いた。
基板の大きさは71mmx40.5mmで、最近の受信モジュールに比べると大分大きく、時代(1990年代)を感じさせるい。
ANT入力コネクタがMCXコネクタのため、現在MMCX-MCX変換を
Sz-Parts
にオーダー中。(2010.10.20)
左は届いたMMCX-MCX変換ケーブルと後述のバラピン-10Pin角コネクタケーブルをJupterに差し込んで見た様子。
そしてJupiterを1ppsロックテストで使用した装置に実装し10KHzロックテストを行う。
装置のOCXOと基板(カウンタ・PC/PasePomparator)・電源等)はそのまま流用する。
Jupiter上面のコネクタピンは2.54mmピッチかと思ったらこれが2mmピッチ。
このサイズのメスコネクタはパーツショップで入手出来なかった。
止む無くPC用のUSBコネクタのバラピン-10Pin角ケーブルを流用する。
バラピン側をJupiter側に使い、OCXO基板側に10Pin角コネクタを使う。
手前味噌だが中々のアイデアだと思わない?。
JupiterへはVcc(5V)・ANT-Power(5V)・GNDを供給し、10KHz出力・1pps出力・Tx-D・Rx-D・GNDを取り出す。(2010.1023)
基板上の配線は74HC4046のPC入力を10KHzに変更するのみ。LPFのCは10μFそのままとした。 電源を入れるとOCXOが冷え切っているので波形が目にも止らぬ速さで流れる。
FFモードはRS。数分間のドリフト後、引き込み動作が始まる。C=10μはちょっと多すぎる感じか?。
流れる波形数が時間と共に減り、最後は静止するかしないか位になる。ここまで電源投入から15分以上を要する。
当然OCXOの立ち上がりタイミングでPCの動作開始点が変わるので、運がよければもっと早いし、悪ければもっと遅い。
この状態からFFモードをJKに切り替えると、また猛スピードで流れる。流れっ放しかと思っていると速度が徐々に低下。
そして波形を目で数えられるようになり、さらに流れが緩くなり静止するが、次からは反対側に流れ出す。
そしてまた反対側で静止して再び元の方向へ流れる。この繰り返しで収斂して行くがRSの場合より時間を要する。また収斂値にドリフトを伴っている。ただし時間を得れば無くなるかも知れない。
しかし、全く調整することなくこの状態に追い込めるのはさすが10KHz比較。素晴らしいの一言だ!。以下動画参照。(2010.1024)
引き込み付近の10秒間動画。 正弦波がThunderboltの10MHzリファレンス、これで水平軸トリガ。 矩形波が実験機(C=10μF)。
←RS-FF
JK-FFより収斂良好。若干のドリフトあるが元に戻る。非常に安定。
JK-FF→
RS-FFより収斂劣る。一定のドリフトが残るが元に戻る。安定。
(2010.10.25)
念のため簡単にデータ取りをしてみた。通電から凡そ11時間後、1時間あたりの10MHzドリフトは±1周期以内で、なおも継続中だった(リファレンス:Thunderbolt、受信衛星4個)。*E-11桁を示しており、これはかなり良好な数字である。またThunderboltも衛星の受信状況で時折ドリフトがあり、また受信能力も各受信モジュールで異なるので、絶対的な判断は難しいレベルになった。
なおJupiterの出力はDuty比=50%なので、10進カウンタ
74HC390
の接続を1/2分周→1/5分周から1/5分周→1/2分周にすればOCXO側のDuty比も50%にすることが出来る(回路図修正済み)。
74HC4046
のPCであるRS-FF(PC3)やJK-FF(PC2)は立上りエッジの比較なので問題はないが、EX-OR(PC1)をPCとして使う場合は必須である。回路変更を実施する(これに併せて74HC390の位置をPCに近い方へ異動させ、逆側の16Pinソケット2個を未使用にした)。ところが追い込み時、上下30周期程度になったところから先に進まない。一体どうしたことか・・・。(1010.20.26))
上記までのLPFバッファオペアンプは事情によりLM358。このDCドリフトか低域ノイズの問題かと想像し、思い切ってソケットから引き抜きジャンパー抵抗で
オペアンプスルー
(3番Pin-7番Pin)して単純なRC一段のLPFを構成した。
すると見事に収斂が進みRS-FFに近い状態になったが、収斂後は±1/4周期程度の緩やかなドリフト(追い込み動作はしている)を伴うものの、中心は*E-11オーダーにいる。前述のJK-FFに似ているが、SW配線をEX-ORに変えたので詳細な比較はできず。
RS-FFはオペアンプスルーは良好で1時間あたりのドリフトは10MHz1周期以内(*E-11)に収まる。なお2段接続(3番Pin-1番Pin&5番Pin-7番Pin)も同様であった。このあたりはLPF定数や方式に起因しそうな感じがする。総合すると
5V制御OCXOを使う限りOPアンプバッファは必要ない
結論だ。
ちなみにRS-FF/JK-FF/EX-ORでターゲットの位相が180/0/90度と異なるので、モードを切り替えると一機に追い込み動作が始まる。健気な感じがして面白い。
なお将来的にはPCのタイプ(RS/FF/JK-FF/EX-OR)をJPで選択できるようにする予定。(1010.10.27)
回路図にTTL-RS232C変換(MAX232C)を追加。(2010.11.01)
以下の作業を実施した。
①RS-232CドライバMAX232Cと周辺回路を実装。
②PCタイプ切替(EX-OR/JK-FF/RS-FF)JPを追加。
③基板への配線を10Pナイロンコネクタにまとめた。
④不要ICソケット撤去。
⑤内部ケーブルをインシュロック処理。
・・・②により基板の保守性が格段に向上。10Pコネクタ内訳は1:GND、2:7.5~12V(UnRegIn)、3:5V(RegOut)、4:PC-Out、5:OCXO-Cont、6:Manual-VR(-)、7:Manula-VR(+)、8:PCP-Out(LED)、9:10MHz-Out、10:CoaxGND。
OPアンプは取り外しソケットをJPして運用(RC1段パッシブLFP)する。5V以上のOCXOを使う場合に備えソケットと回路はそのままとした。
最終的にRC1段のLPFで、各PCにおいてロックが掛かる事を確認した(*E-10~11)。PCによる違いを敢えて評するなら・・・RS-FF>EX-OR>JK-FFの順になる。G3RUHが自身のサイトで紹介する
Simple GPS・・・
で、安価なEX-OR(74HC86)を使っている理由が分る様な気がする。
左はその状況。MAX232Cは一番左のDIPで下側にケミコンがある。OPアンプ用8PinDIPソケットに黄色いJPワイヤーが見える。その左の黒い部分がPC選択JP。(2010.11.03)
御注意
以下の回路図は暫定かつ実験中のもので動作を保証しているものではありません。
また、回路と部品に定数は随時変更し、案内や履歴は特に示しませんので併せてご注意願います・・・気まぐれです。
Coffee Break
Jupiter/TU30の2個目が届いたので動作テストを試みた。ところが全くNGで1ppsも10KHzも出力しない事が10月30日に発覚。 藁にもすがる気持ちで幾度も配線を確認したが間違いなかった。
それでディーラーのBobMokia氏へメールを送ると、事情を理解し代替を本日発送すると返信があった。
またおまけに以前から紹介されていたTU30の後継機種であるTU60も1個同梱するとあった。何とラッキィな事かとBobへ御礼メールを送った。
写真は2つのTU30。左が後から届いたNG品。USEDと言えども、どのような動作確認をしているのか興味あるところであるが、購入前に念を押す必要がある。(2010.11.02)
関連情報
・・・
VE2ZAZ方式で試すGPS 1ppsロック10MHzOCXO
関連情報
・・・
GPSの1pps(1Hz)で10MHzVCXOをロック出来るか
関連情報
・・・
Jupiter/TU60で試すGPS 10KHzロック10MHzOCXO
関連情報
・・・
目指せ1E-12・・・GPSロック高安定発振器
関連情報
・・・
Hiroshi's blog・・・GPSの1ppsロックで出会ったKanekoさんの実験サイト
関連情報
・・・
JA6XKQ・・・Yoshiyuki Takeyasuさんのトランジスタ芸術
関連情報
・・・
VE2ZAZ・・・Bertrand ZauharさんのA Simplified GPS-Derived Frequency Standard
関連情報
・・・
W5OJM・・・Brooks SheraさんのA GPS-Based Frequency Standard
関連情報
・・・
G3RUH・・・ご存知James R Millerさんのサイト


 凡そ8ヶ月間GPSの
凡そ8ヶ月間GPSの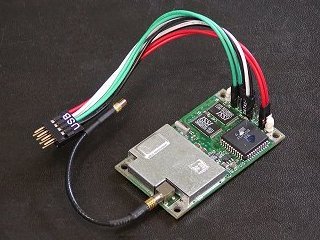 左は届いたMMCX-MCX変換ケーブルと後述のバラピン-10Pin角コネクタケーブルをJupterに差し込んで見た様子。
左は届いたMMCX-MCX変換ケーブルと後述のバラピン-10Pin角コネクタケーブルをJupterに差し込んで見た様子。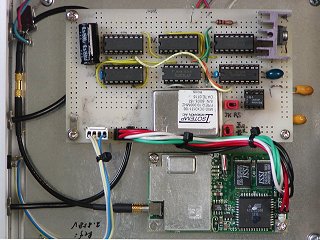 基板上の配線は74HC4046のPC入力を10KHzに変更するのみ。LPFのCは10μFそのままとした。
電源を入れるとOCXOが冷え切っているので波形が目にも止らぬ速さで流れる。
基板上の配線は74HC4046のPC入力を10KHzに変更するのみ。LPFのCは10μFそのままとした。
電源を入れるとOCXOが冷え切っているので波形が目にも止らぬ速さで流れる。