これから数回にわたってモデリングの題材としてロボットを採り上げていこうと思います。
よくある美少女にしなかったのは、やはり人体などの有機的なラインは超初心者にはモデリングが難しいためです。
また、思った通りのものができず挫折してしまう可能性が高いからです(私は挫折しかかった)。
一方、ロボットなどのメカ系統のものであれば、直線と平面の組み合わせでそれなりの物ができ、初心者でも楽しめると思います。
ロボットを作るときには、パーツごとにモデリングしていくことになります。
複雑な構造をしているように見えて、パーツごとに見ていくと意外と簡単だったりします。
まずはパーツ分割について考えていきます。
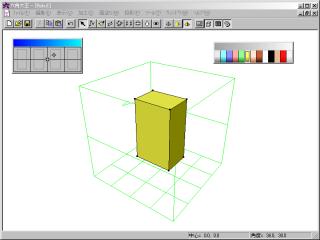
次の作例を見てみましょう。
これは単なる直方体です。
ロボットに見えませんか?(見えるあなたはゴールドライタンを知っているにちがいない)
これに頭と手足をつけます。
まず、直方体をコピーし、貼り付けます。
各点の位置を調節し、頭とします。
今度は「編集」→「左右に貼り付け」とすると左右に直方体ができますので、これも位置を調節して手にしましょう。
同じ方法で足も作ります。
なお各パーツは、右と左で別々にグループ化しておきましょう。
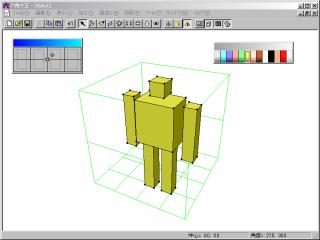
ブリキのおもちゃ程度にはみえます。
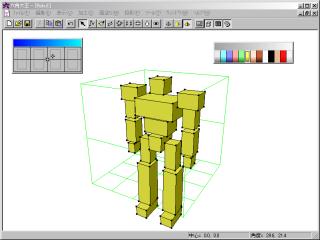
手足と胴体を関節ごとに分けてみます。
「コピー」、「貼り付け」、「左右に貼り付け」を駆使して直方体を増やして大きさを調節するだけです。
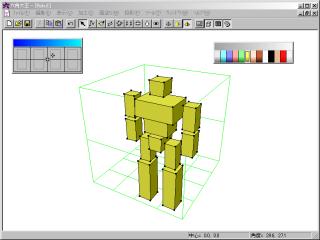
これならポーズを考えるための素体くらいには使えるものになります。
これに肩、手首、足首を加えると、主要パーツは全てそろいます。
また、コピー&貼り付けで増やします。
あとはこれらのパーツごとに好みの形にモデリングしていけばいいのです。
このようにパーツごとにモデリングすることで、ポーズをつけたり、大きさのバランスを変更したり、追加パーツを加えたりするのが楽になります。
また、拳のように、面倒な割にはどのロボットでも変わらないようなパーツは、流用することができます。
次回からしばらくは、簡単なオリジナルロボットをパーツごとにモデリングしていこうと思います。
ちなみにその完成予想図はこちらです。