さて、第2回目ですが、腕を作ってみましょう。
この部分は作り込みはじめればキリがない部分ですので、あくまでベースとなる形のみとします。
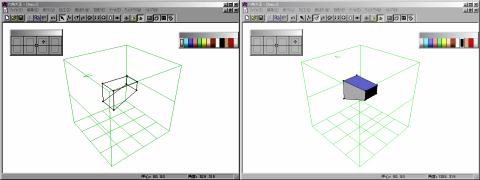
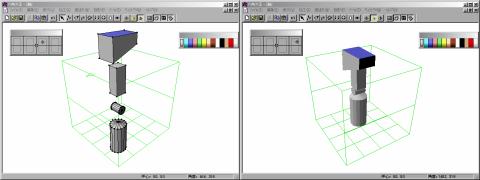
何も考えずに直方体を作りましょう。
色は、上腕部がつながるところを黒に、上面を青に、その他の部分をグレーにしてみました。
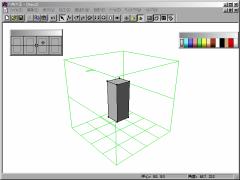
同じく直方体を作ります。
全体をグレーにして出来上がり。
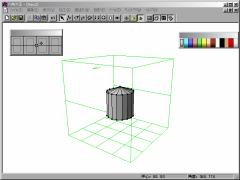
関節部は、簡単なところで円筒を使いましょう。
自分で作ってもいいのですが、やっぱり面倒なので、六角大王についてくる部品集からコピーします。
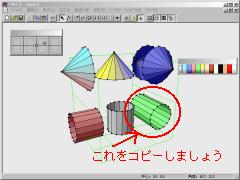
グループ解除して、グレーにしておきましょう。
ただ、両端が開いているので、これをふさぎましょう。
円の中心に対して対称となる点を結びます。
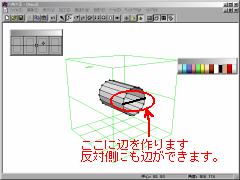
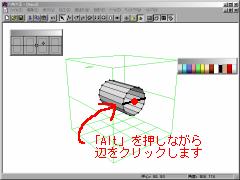
出来た辺の上に点を追加します。
「Alt」を押しながら辺をクリックすると点が追加されます。
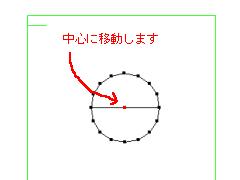
視点を側面からにして、その点を円の中心に移動します。
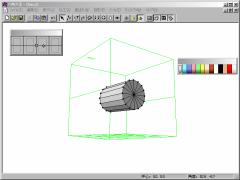
あとはこの点と円筒の各点とを結んでいきます。
三角形で両端がふさがったのでグレーに塗っておきましょう。
これも円筒を使ってみましょう。
先程の要領で両端をふさぎます。
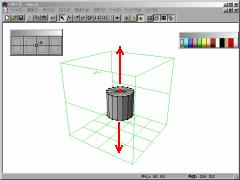
ここで、肘と手首を接続する面を少し盛上げて起きましょう。
ふさいだ面の中心点を移動します。
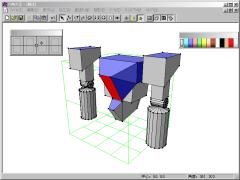
これらのパーツを組み合わせ、大きさ、形を調整しましょう。
さて、片腕を作りました。
ファイルに“腕”とでもつけて保存しておきましょう。
次にこれら全てをコピーし、前回に作った“胴体”に貼り付けます。
このとき、【左右に貼り付け】で右腕と左腕とします。
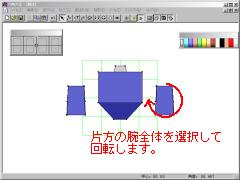
ただ、向きが90度ずれていますので、上方視点で回転しましょう。
まず、【選択】の状態で、どちらか一方の腕全体を囲んで選択します。
メニューの【加工】から【回転】を選び、画面内を適当にドラッグしてみましょう。
選択した腕と、その反対側の腕が回転しますので、90度回転しましょう。
では、これを“胴体”とは別に、“全身”というファイル名で保存しておきましょう。
これで腕が出来ました。
次回は拳を作ってみましょう。