今回は手首を作ります。
作業的に面倒でポーズをつけるのも大変だけど、作っておけば使い回しがきくパーツです。
時間があるときに作っておくのがいいかもしれません。
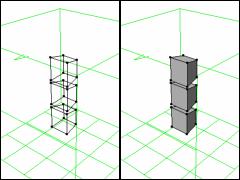
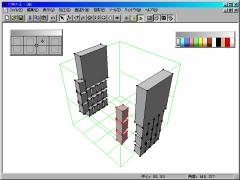
小さめの直方体を作り、奥側の面を少し小さくします。
これをコピー&貼り付けで3個にします。
これが指になります。パーツごとにグループ化しておきましょう。
先程の指を切り取り、【左右に貼り付け】を行います。
貼り付けたパーツの位置を少しずらして、もう一度【左右に貼り付け】ます。
位置を揃えて指の完成です。
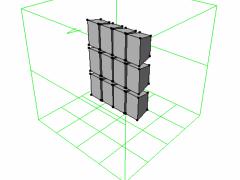
これではやはり大きいので、拡大縮小で小さくしておきます。
指が短すぎる、あるいは長すぎるという場合は引き伸ばしを行います。
その方法ですが、まず、視点を正面からにします。
指全部を選択した後、メニューから【加工】→【引き伸ばし】を選びます。
あとは【拡大縮小】と同様に、画面内をドラッグしていけばOKです。
【拡大縮小】ではすべての方向が同じ比率で変化します。
それに対し、【引き伸ばし】では、その視点での縦、横の比率が変化し、奥行きは変化しません。
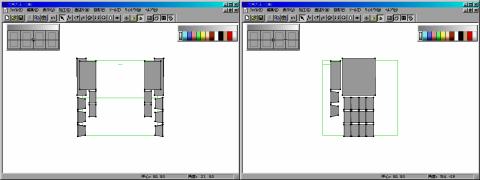
新しく直方体を作ります。
大きさ、形、位置を調整して掌とします。
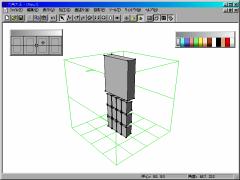
さて、親指を作るわけですが、六角大王では左右対称の物しかできないのはご承知のとおり。
ですので、片手ずつ作ることはできません。
先程作った掌を切り取り、【左右に貼り付け】、上方視点で90度回転し、位置をずらしましょう。
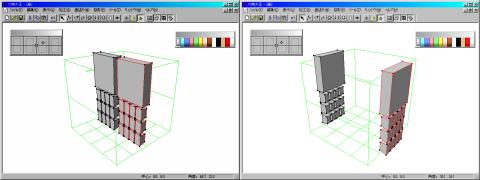
で、親指を作るわけですが、指を一本選択し、【コピー】→【貼り付け】で増やします。
上方視点で向きを90度回転し、位置を調整します。
親指の付根にあたる部分をグループ解除し、下図のように形と大きさを変更します。
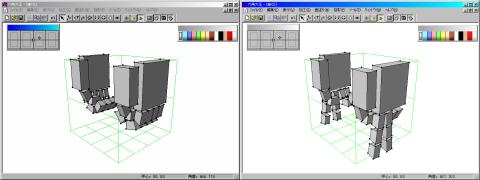
これで拳の完成です。
保存しておきましょう。
拳はできても、これでは味気ないというか、使いようがないというか。
で、ポーズをとりましょう。
指ごとに移動し、パーツを回転したり移動したりして、お好みのポーズの物を作りましょう。
では、この拳をこれまでに作ったパーツと合成しましょう。
「全身」のファイルを開き、拳をコピーしてそこに貼り付けます。
かなり大きさが違いますので、縮小しましょう。
できあがりはこんな感じです。
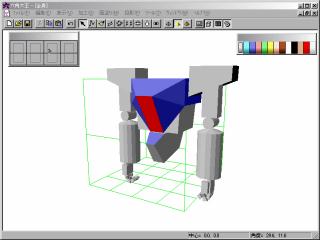
だいぶロボットらしくなってきました。
上書き保存しておきましょう。
手首では、指の関節など作り込むこともできますが、まぁ、それもそのモデリングの使用目的にもよります。
背景と合成していろんな特殊効果をかける場合、指の関節などは作りこんでもあまり意味がないことが多いでしょう。
今回の拳は最低限のパーツのみで構成しているので、実際はもう少しデティールアップしたほうが見栄えはいいかもしれませんが...
では、次回は脚を作ってみましょう。